Command Management
Overview
Commands are the lowest-level operational units in the WCS task execution flow. They are direct instructions issued to equipment (e.g., AGVs, robotic arms, conveyor systems) to perform atomic actions such as move, pick, place, or charge.
Commands are generated based on the task's action type and are formatted according to the equipment's control protocol. For example, if a robot's assigned task is to perform a pick task, the system may first send a move command to direct it to the pickzone, followed by a pick command once it arrives.
Command is generated and packaged according to the device's communication protocol. If the command fails, error handling mechanisms are triggered, and the command can be resent or retried after correction.
Command Search & View
The system provides powerful filtering options to locate specific commands efficiently. Supported search criteria include:
-
Command ID
-
Command Type (e.g., Transport, Move, Count, Release Agv)
-
Task
-
Equipment
-
Created Time
-
Status
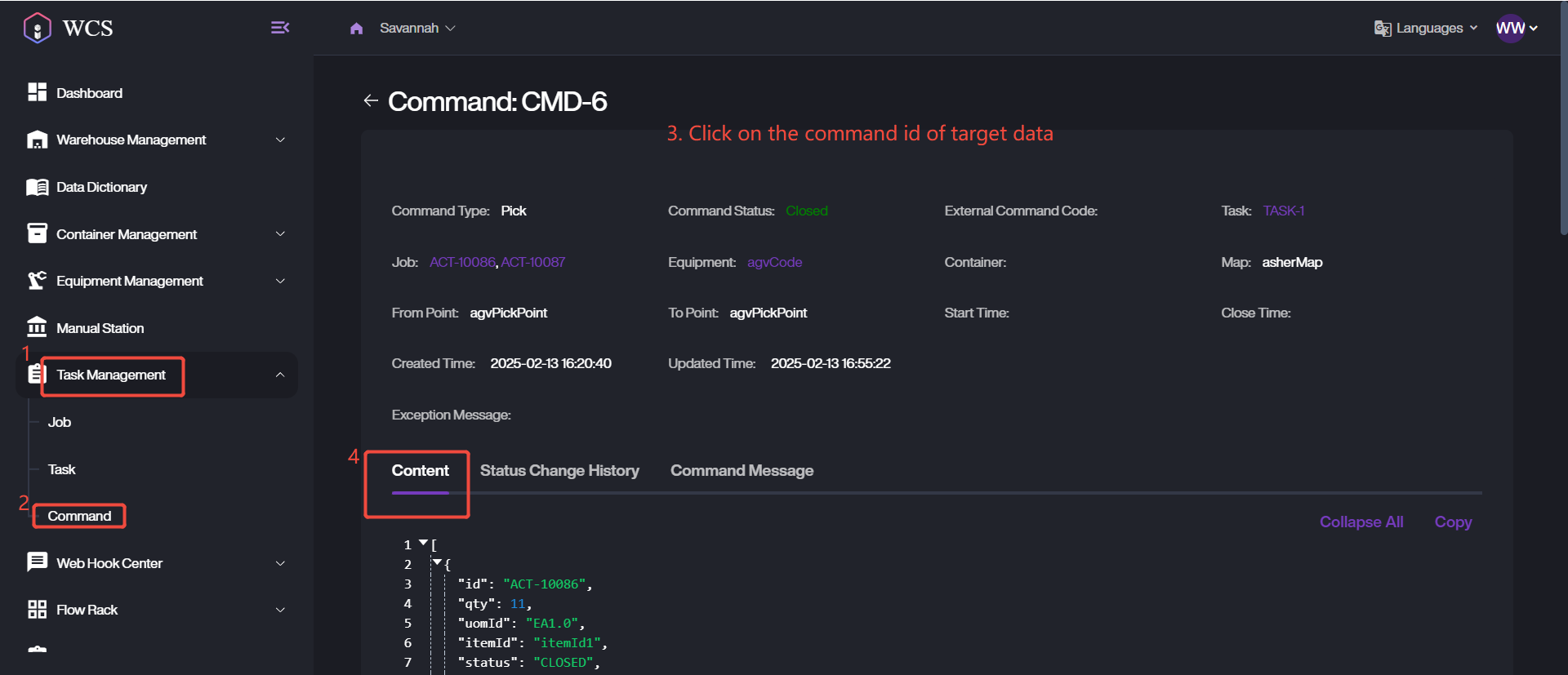
The system organizes the command records into a table view, with the key information. By clicking on Command ID, users can view the command connect in JSON format.
Add New Command
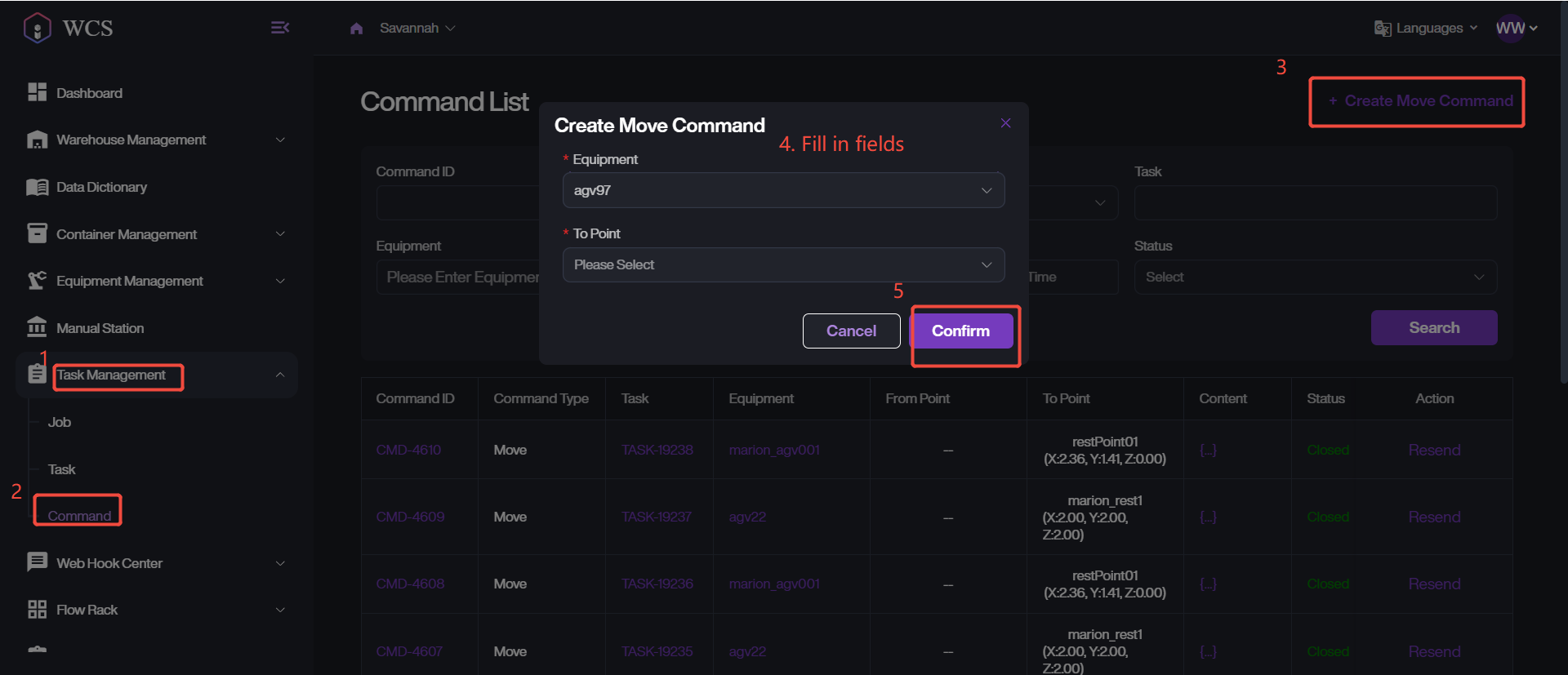
The system supports the manual creation of new move commands through Command section.
-
Navigate to Task Management > Command > + Create Move Command.
-
Choose the equipment that will execute the command.
-
Select the target point or location for movement.
-
Click on Confirm to complete the creation.
Note:
Only commands of type Move are allowed to be manually created.
This restriction ensures that command creation remains safe and consistent with WCS scheduling logic. All other command types must be generated automatically by the system based on task execution flow and equipment behavior.