Task Assignment Strategy
Overview
In an automated warehouse, a variety of devices such as AGVs work simultaneously to handle transport tasks. The system must dynamically assign tasks to these devices based on multiple factors including:
-
Task Priority
-
Multi-task compatibility with shared transport paths
-
Device location and availability
-
Resource conditions in the map (e.g., target stations)
For example, when a new transport task is triggered, the system evaluates the optimal route and assigns the task to the most suitable available AGV. At the same time, it ensures other AGVs are appropriately scheduled to avoid congestion or idle time.
Note:
Task assignment should ideally be performed in a single service node to avoid race conditions and duplicated assignments. Each device is restricted to executing only one task type at a time.
Assignment Workflow
1. Capacity Filtering
The system checks all devices and classifies them by MapCode, labeling each map for whether it has available capacity.
-
Unavailable: Offline, malfunctioning, in use, or low battery
-
Available:
-
Idle with no task
-
Under-tasked (has task but not yet full)
-
Currently performing Movement Task
-
Low Battery Handling
When devices with low battery are detected during capacity filtering:
-
Check for available charging stations in the current map. If available, assign a Charge Task.
-
If no stations are available, check if any charging device has exceeded a cancelable charge threshold. If so, cancel and reassign the station.
-
If no valid charging scenario exists, the low battery device will remain on standby.
2. Task Filtering
The system filters all unassigned steps within each map. Among them, if the task type is PickTask or TransportTask, path-overlap based multi-tasking is considered.
Path-Overlap based Multi-Tasking
If the multiple tasks meet the conditions below:
-
Pick Methods are the same and not Wave Pick by Item
-
Next Action is the same
Tasks are sorted by path overlap between existing and new steps:
-
The system calculates overlap between current and pending pick-up locations.
-
Task with ≥80% overlap are prioritized and assigned based on remaining capacity.
3. Map Resource Filtering
Once path-overlapping assignments are completed, the system continues to filter tasks and resources for additional assignments:
-
For all unassigned steps, check for resource conflicts with steps currently in execution.
-
For task type such as Transport or PickToCart, filter out tasks whose pick locations conflict with in-progress steps (if any step overlaps, the whole task is excluded).
-
If the target station of an in-progress step has reached its task limit, the task is not assigned.
-
All remaining conflict-free tasks are eligible for assignment to idle devices.
Idle Capacity Assignment
After map resource filtering, tasks are matched with available devices:
-
If
Pick Methods are not Wave Pick by Itemandpath overlap = 100%, assign to the same vehicle. -
After all 100% overlap tasks are assigned, remaining capacity is used for PickTask and TransportTask, followed by MovementTask.
-
Only one task can be assigned if it doesn’t meet the 100% overlap criteria.
Cancel Movement to Release Capacity
If unassigned tasks remain and idle capacity is insufficient:
-
Check if any device is performing a regular Movement Task (e.g., parking).
-
If so, cancel the movement task to release the device for reassignment.
Charging or Parking for Remaining Idle Devices
If all tasks are assigned and idle vehicles still remain:
Direct the vehicles to either charging stations or rest zones, depending on battery status and availability.
Management Features
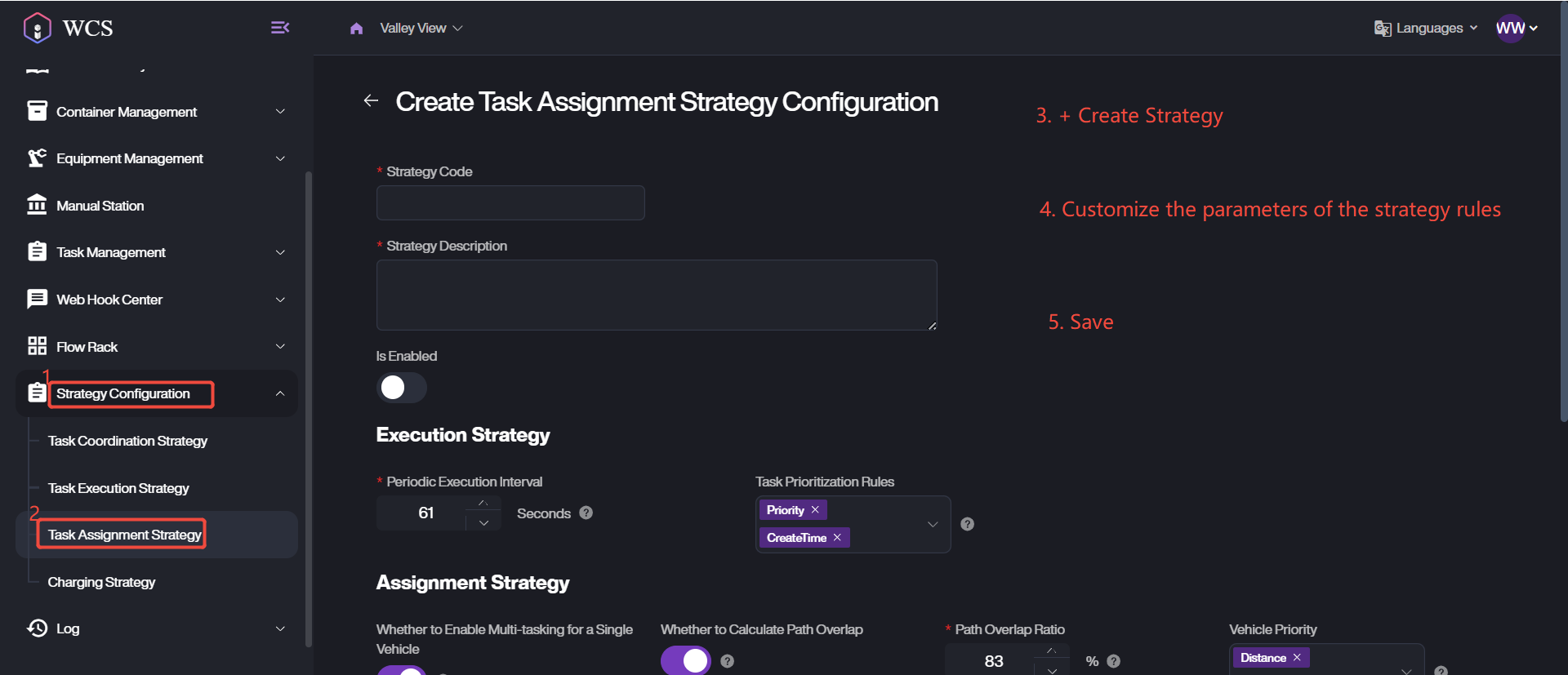
Add New Strategy
-
Start the creation via Strategy Configuration > Task Assignment Strategy > + Create Strategy.
-
Defines Strategy Code and Description, and setup the relevant configurations, such as execution strategy or strategy mapping.
| Parameter | Description |
|---|---|
| Whether to Enable Multi-tasking for a Single Vehicle | When enabled, devices that support handling multiple tasks of the same type can be assigned multiple tasks based on their capacity. |
| Whether to Calculate Path Overlap | When multi-tasking is enabled, this determines whether to calculate path similarity to increase operational efficiency. |
| Path Overlap Ratio | Threshold (%) for path similarity required between new and existing tasks for assignment. Input range: 1-99%. |
| Pre-allocation of Target Areas | When a device's current task ends in the same area as the new task's starting point, the system can pre-assign the next task to the same device to increase utilization. |
| Idle Vehicles Automatically Go to Rest Areas | When enabled, idle devices will automatically return to rest areas if no new tasks are available. |
- Save the information to complete the creation.
Edit/Delete Existing Strategy
-
Locate the target strategy rule on strategy list.
-
Edit or Delete the record according to your requirements. Please note that enabled strategies can not be deleted.
-
Update the necessary configurations.
-
Save the changes to apply.